안녕하세요. 나우로보틱스 블로그 지기, 나우지기 입니다. 사출성형 현장에서 근무하시는 분들은 아시겠지만 이제 사출성형 현장에서는 단순하게 사출성형만 하는 경우가 점점 줄어들고 있고 보다 다양한 작업들이 많이 이뤄지고 있죠? 사출성형에서는 과거에는 인서트와 취출 등과 같은 단순한 작업들만 진행하지 않고 여러 다양한 가공 과정들을 진행하기 때문입니다. 대표적으로 게이트 커팅 등과 같은 커팅 작업들이 있겠고 그외에도 팔렛타이징, 이송, 적재 등 다양한 2차 가공 작업들이 이뤄지고 있습니다!
하지만 직교로봇은 로봇의 목적과 용도가 사출기 내외부에서 원재료와 물건을 넣는 인서트와 취출에만 국한이 되다보니 당연히 2차가공에는 적용하기가 불가능하였고 이로인해 사출현장의 모든 공정을 자동화 하는 것은 불가능했습니다. 이를 해결할 수 있는 좋은 방법이 바로 다관절 로봇이 되겠는데요, 이미 블로그를 통해 몇 차례 사출성형 현장에서 다관절 로봇이 적용된 사례는 많이 소개해 드렸습니다! 아래의 링크를 참고해주세요~!
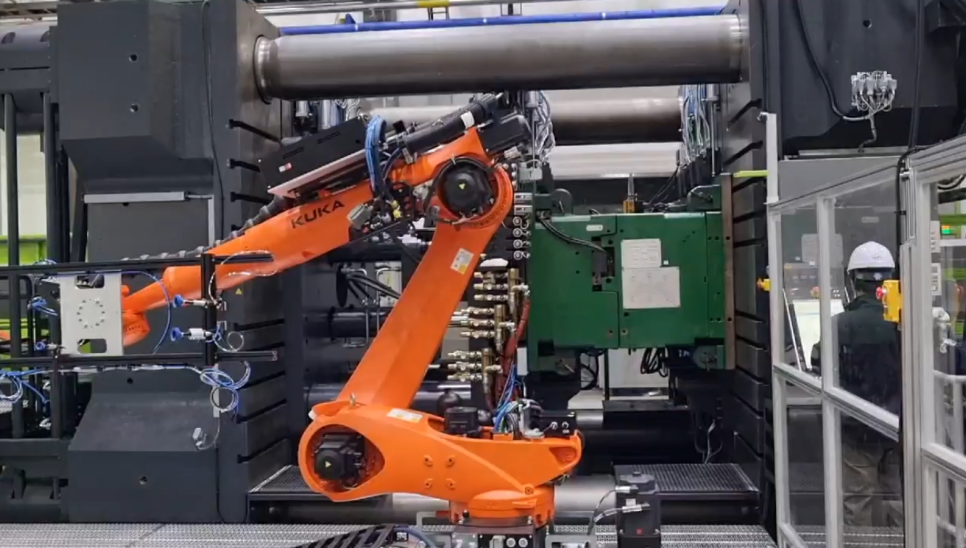
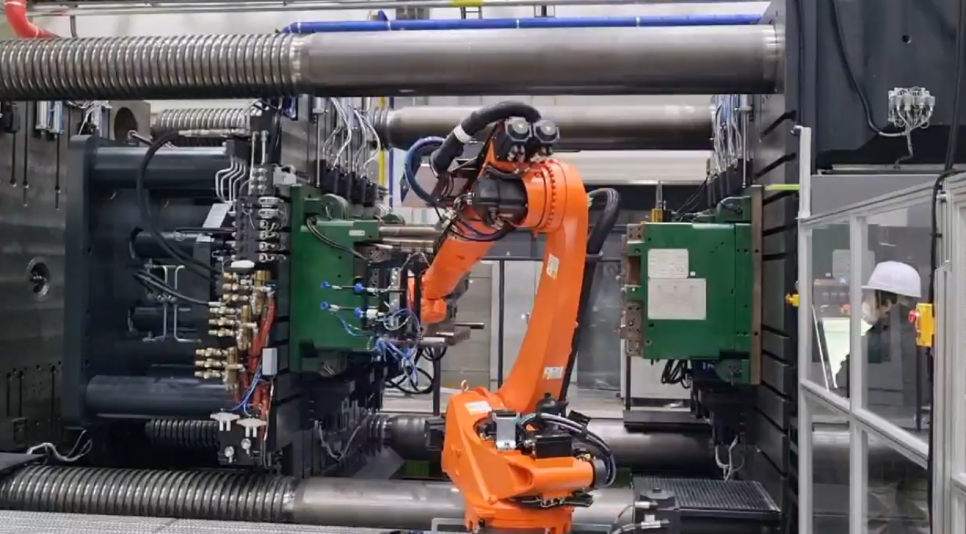
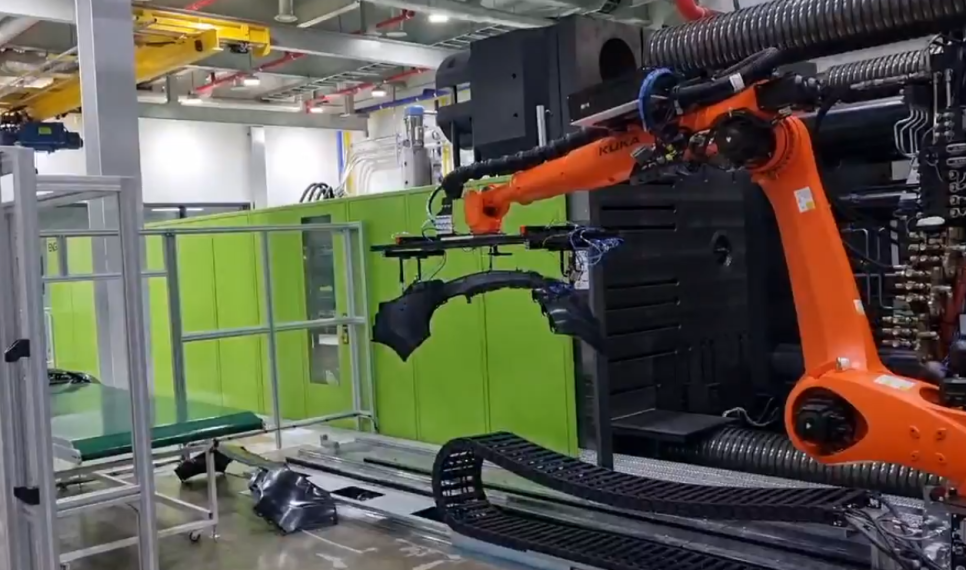
오늘도 나우로보틱스가 다관절 로봇을 바탕으로 해서 사출성형 현장의 취출 시스템을 구축한 사례를 소개해 보도록 하겠습니다! 해당 현장에 적용한 다관절 로봇은 쿠카 로봇이며 KR120 모델입니다!
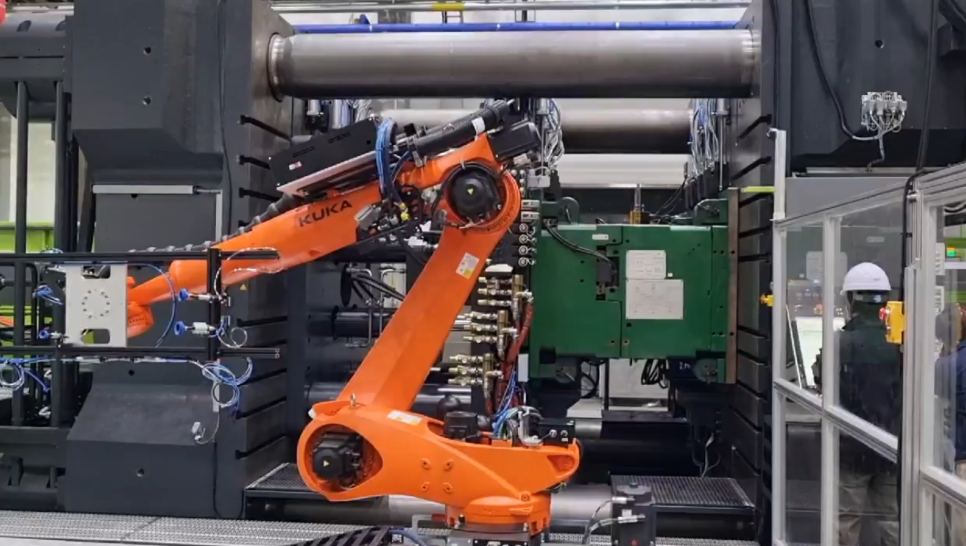
사출기의 금형의 개폐지점 바깥쪽에 다관절 로봇을 설치하여 준비를 시킨 후 금형이 열리면 로봇이 진입하여 취출 과정을 진행하게 됩니다! 현재 사출기 바깥에서 취출 하기 위해 대기 중인 다관절 로봇의 모습입니다!
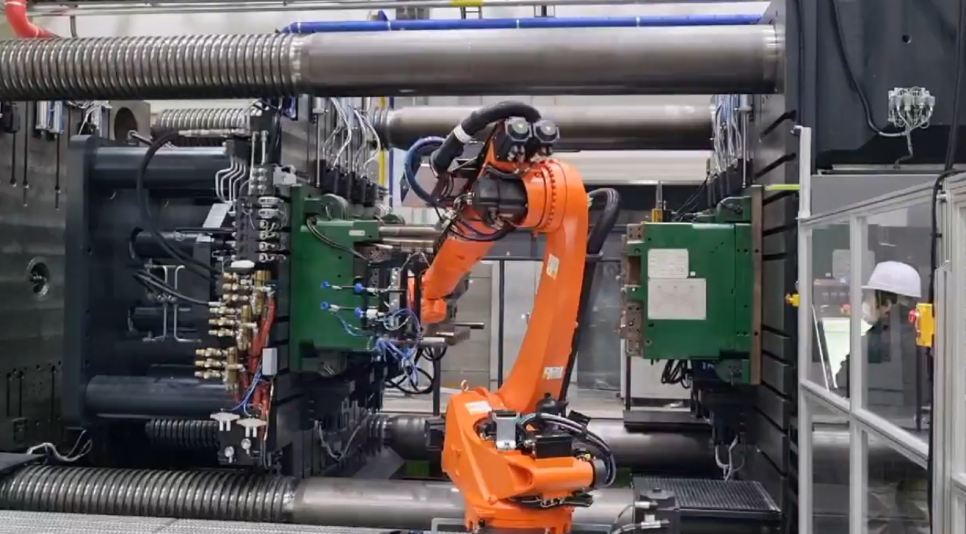
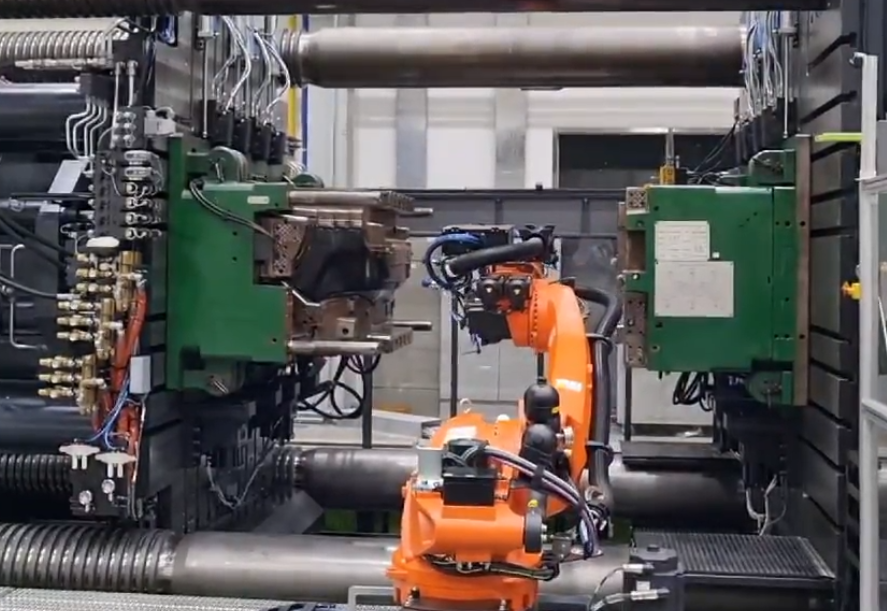
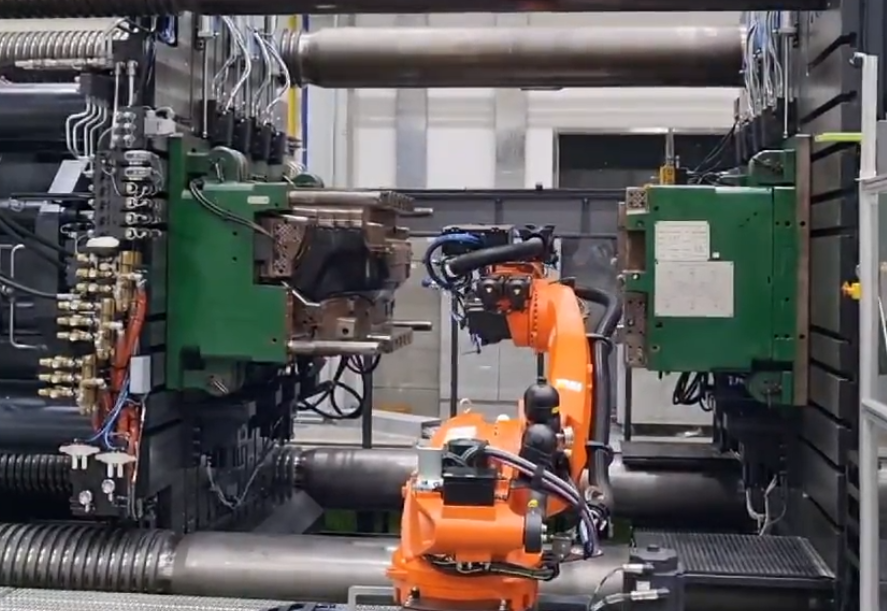
금형이 열리고 나면 천천히 다관절 로봇이 진입하게 되는데요. 다관절 로봇의 또 하나의 장점은 직교로봇에 비해 움직일 수 있는 반경의 범위와 넓이가 훨씬 더 넓고 크기 때문에 복잡한 금형 구조에 맞춰 로봇이 회전하여 진입을 할 수 있답니다!
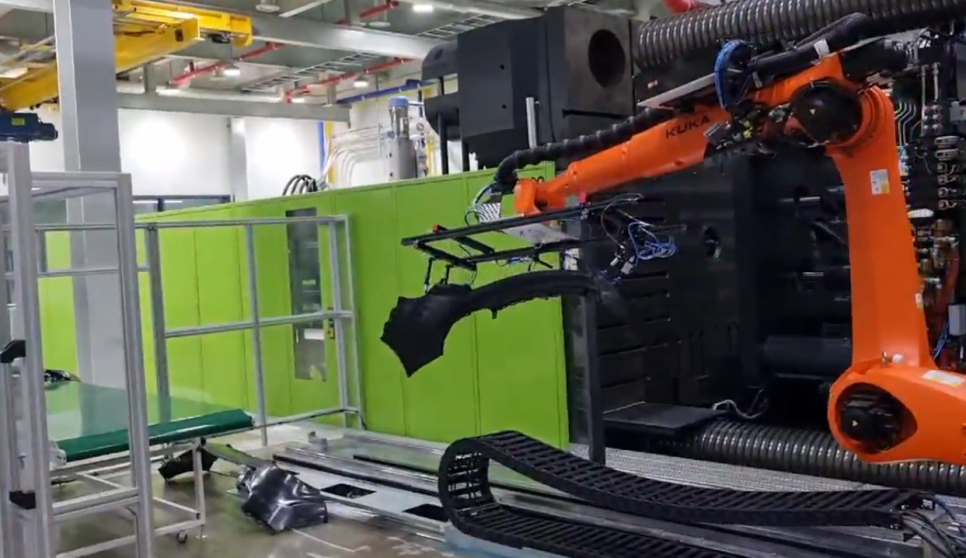
안정적으로 취출을 하고 난 후에는 컨베이어로 이동하여 배출하기 위해 지그가 또 한번 회전하는데요, 컨베이어에 안전하게 내려놓기 위해 방향에 맞춰 움직이는 모습입니다! 이런점에서 본다면 확실히 직교로봇보다 다관절 로봇이 훨썬 더 유연하다고 할 수 있겠죠!
그리고 컨베이어에 완제품을 내려놓으면 다관절 로봇이 사출성형 현장에서 하는 취출 과정은 모두 끝나게 됩니다!
사출성형 현장에서 다관절 로봇으로 취출을 하면 좋은 경우는 위처럼 완제품의 크기가 매우 크거나 복잡한 금형구조를 갖고 있거나 또는 아까 처음에 알려드린대로 2차 자동화가 필요할 경우에 이와 같이 진행하면 더욱 좋습니다! 공장과 현장에서 생산하는 생산품에 따라 직교로봇이 적합할지 다관절 로봇이 적합할지는 다르기 떄문에 정확한 것은 로봇을 도입하시기 전에 충분하게 상담을 하시고 진행하시는 것이 당연히 필요합니다!
갈수록 복잡하고 어려워지는 사출성형의 금형 구조와 다양한 공정 과정을 보다 편하고 빠르게 대응하는 방법! 다관절 로봇으로 취출 시스템을 구현해보시는건 어떨까요?