쉬운 다관절 로봇 UI 적용
기존 다관절 로봇의 어려운 코딩방식에서
벗어나 직관적인 UI를 제공해
로봇 전문가가 아니어도 로봇을 보다
쉽게 사용이 가능함
간편한 인터페이스
사출기와 다관절 로봇 간에 표준화된
EUROMAP12 / EUROMAP67로
인터페이스 연결이 손쉽게 가능한
인터록 보드 적용
통합 밸브 박스 시스템
진공상태 통합 밸스 박스 시스템을
적용하여 복잡한 밸브라인 관리를
쉽게 할 수 있도록 설계되어
현장 근로자가 쉽게 다관절 로봇 조작이 가능
인터페이스 연결포트
쉽고 간편한 인터페이스
연결 포트를 통하여 관리가 쉽고
점검 및 보수가 편리하며
로봇 구동 오류를 최소화




")
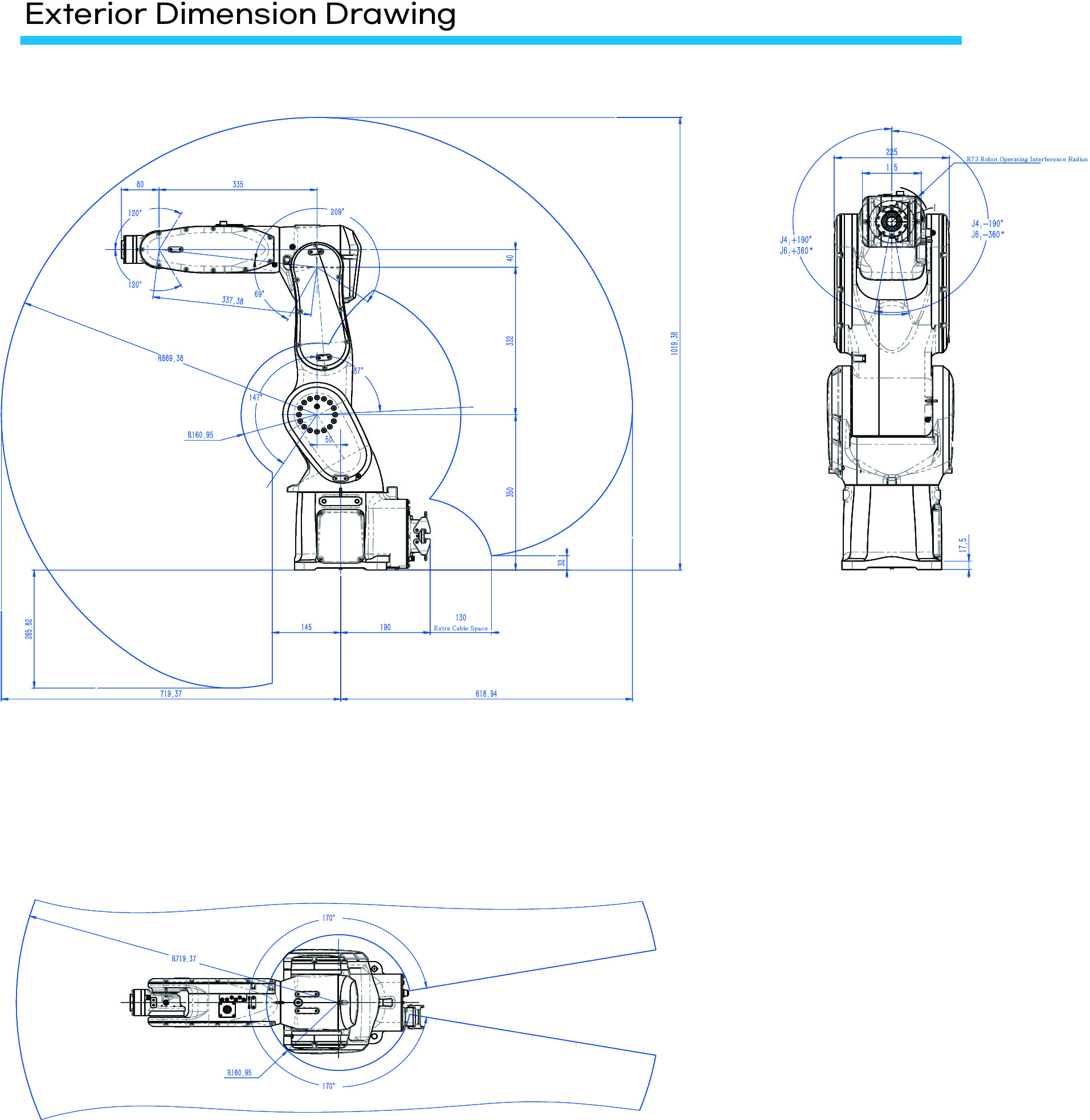
NURO X 8
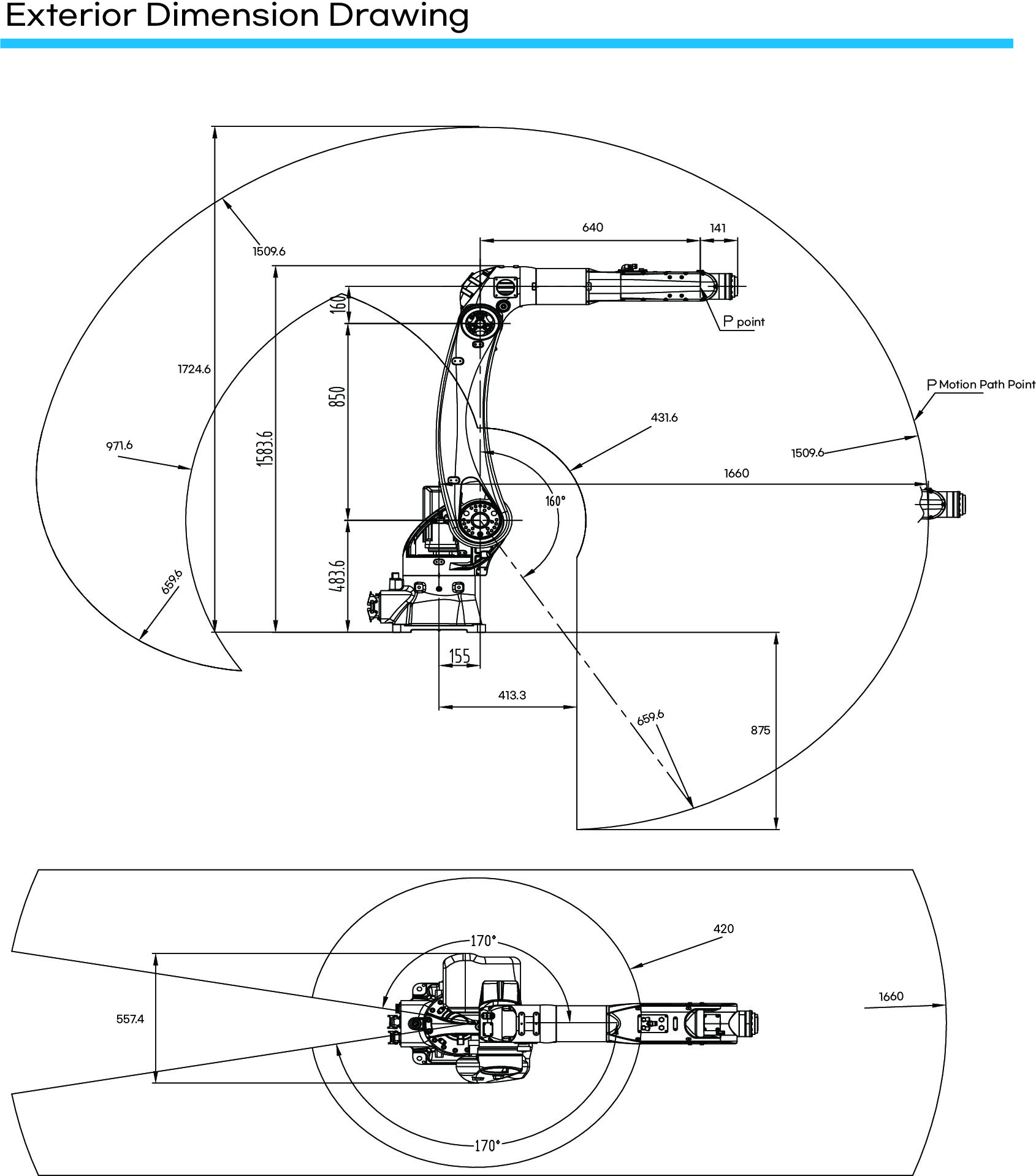
NURO X 25
NURO X 50
NURO X 150
NURO X 210
NURO X 8
NURO X 25
NURO X 50
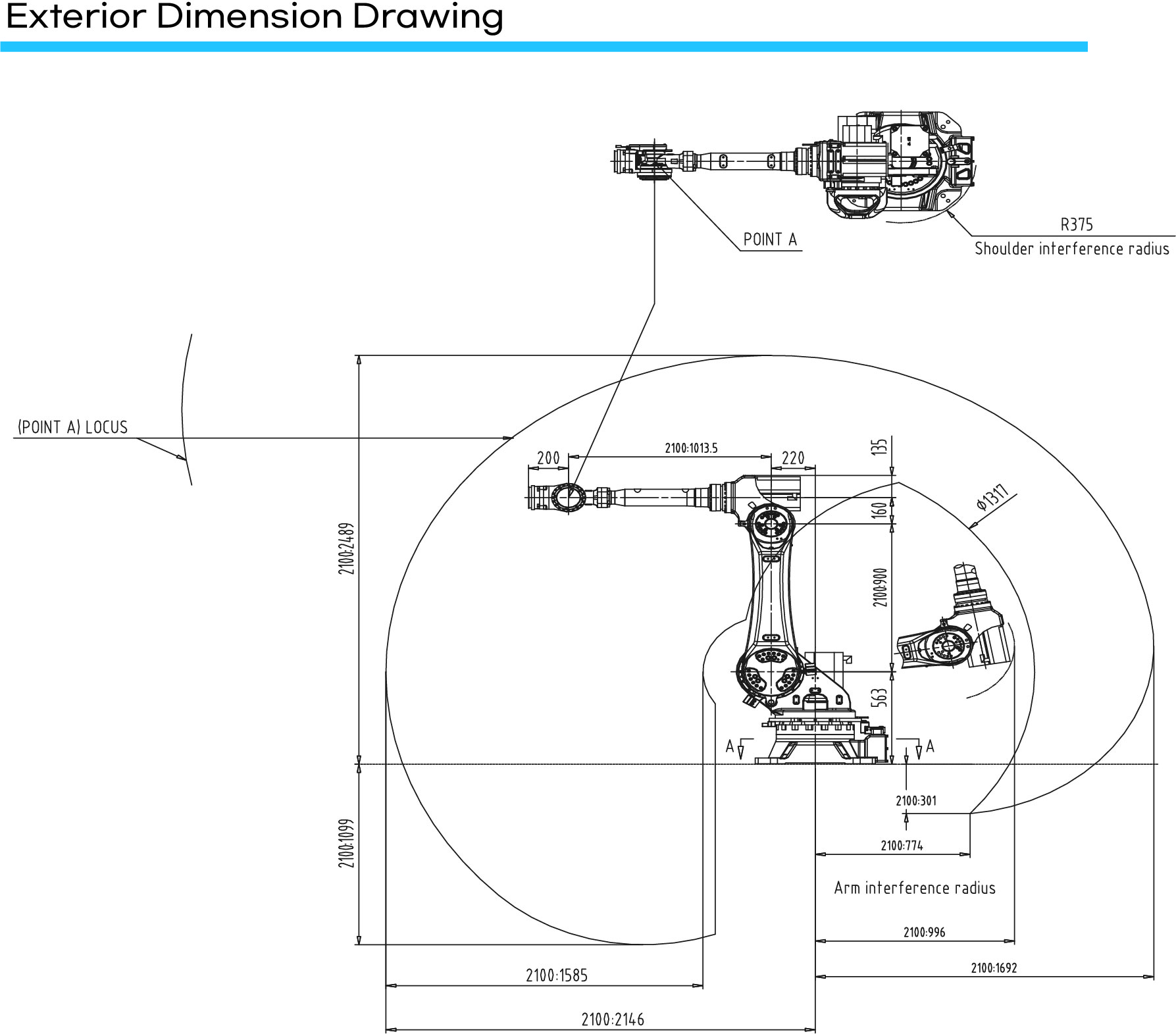
NURO X 150
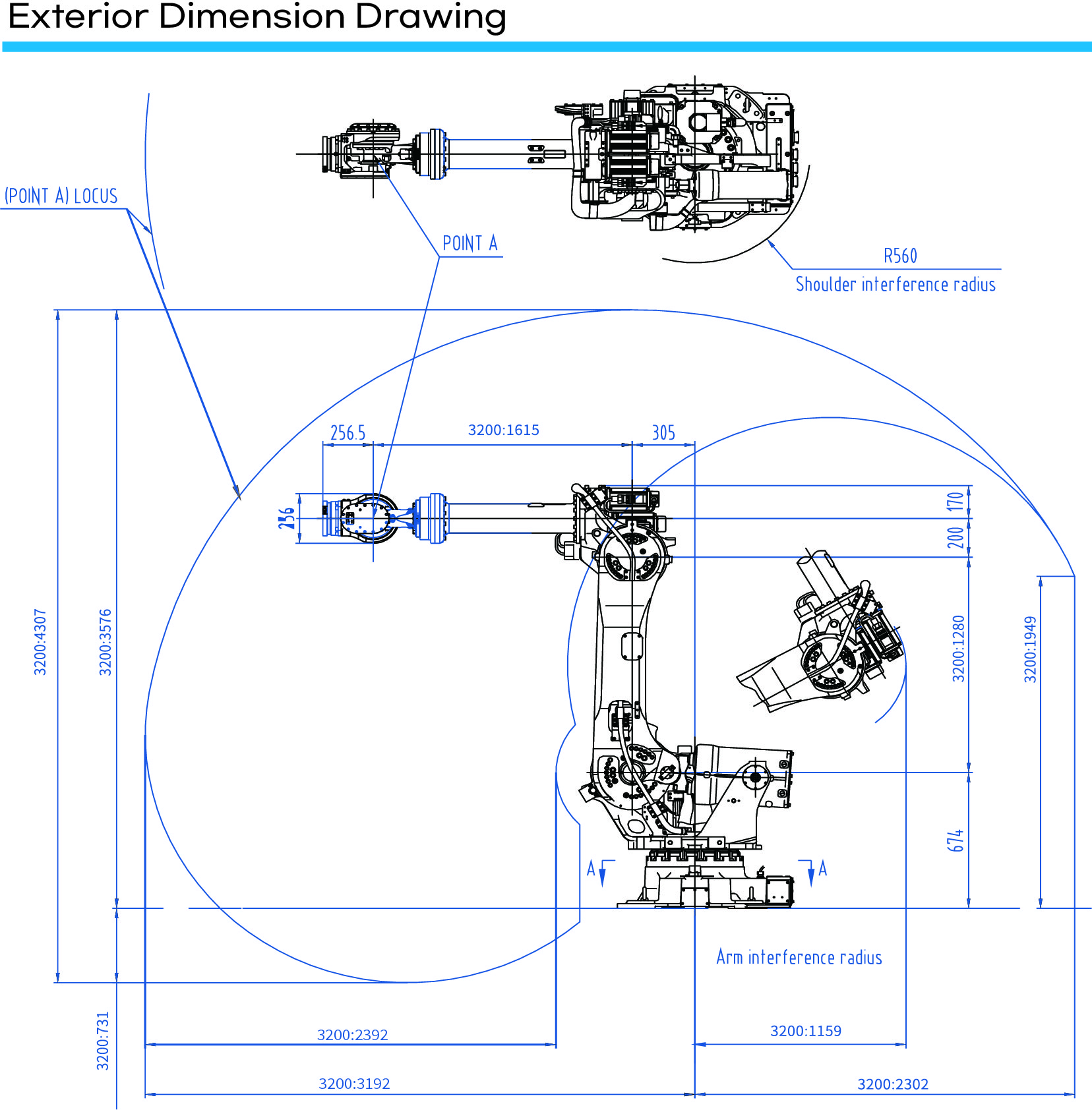
NURO X 210


직관적 유저 인터페이스
직교 취출 로봇처럼 조작이 가능하도록
기존의 어려운 코딩방식이 아닌
직관적 UI로 설계되어 로봇 전문가가
아니어도 쉽게 조작이 가능

최적화된 소프트웨어
취출,인서트,게이크커팅,팔렛타이징 등
사출성형 공정분석을 통해
최적화된 프로그래밍으로
손쉽게 로봇 시스템 구현 가능

간편한 조작
터치스크린을 갖춰 7인치 크기의
스크린과 뛰어난 밝기를 자랑하는
화면을 통해 입력값을
빠르고 간편하게 확인
효율성 극대화
다품종 소량생산 및 복잡한 금형구조 등
사출 성형 공정의 요구사항과
다양한 작업 환경의 요구사항을 해결해
효율성 극대화




