안녕하세요! 나우로보틱스 블로그 지기, 나우지기 입니다! 조립 이송 등과 같은 단순하고 반복적인 업무를 로봇을 통해 자동화 시스템으로 해결을 하고 기존 작업자들은 좀 더 창의적이고 생산 효율을 높일 수 있는데 집중하는 것이 로봇을 도입하고자 하는 큰 이유죠! 그렇다보니 적재와 이송 단계에서 로봇이 많이 사용하게 된 것은 이렇게 로봇을 도입하고자 한 배경과 연관돼 있기 떄문일지도 모릅니다!
오늘도 조립과 이송단계에서 다관절 로봇을 사용해 사출 자동화를 만들어낸 과정을 보여드리고자 하는데요! 다관절 로봇을 이용해 사출품을 조립부터 이송까지 쉽고 빠르게 해내는 과정 지금부터 보여드리겠습니다~!
다관절 로봇으로
사출 자동화 시스템 구축!
이번 사례로 소개해드리는 사출품의 조립과 적재, 이송 단계는 저희 나우로보틱스가 2019년에 있었던 오프라인 전시회 현장에서 실제로 사출 자동화 시스템을 구축해낸 사례입니다! 사출기와 직교로봇에다가 다관절로봇을 추가로 설치해 사출기 안에서 완성된 사출품을 꺼낸 후 다관절 로봇이 추가적인 조립과 이송 과정을 스스로 진행하는 것입니다!
사출 자동화의 첫 시작은 사출기에서 사출품을 꺼내는 것에서 출발합니다! 사출기에 연동돼 있는 직교로봇이 사출기가 사출 작업을 모두 끝마치면 완성된 사출품을 기계 안에서 꺼내와 다관절 로봇이 조립을 할 수 있도록 도와줍니다.
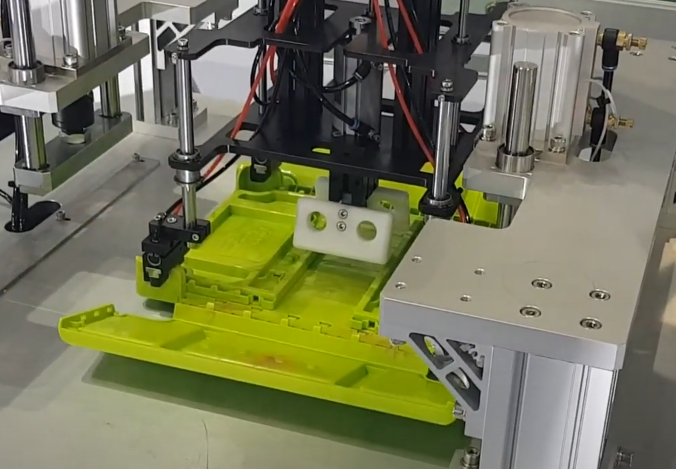
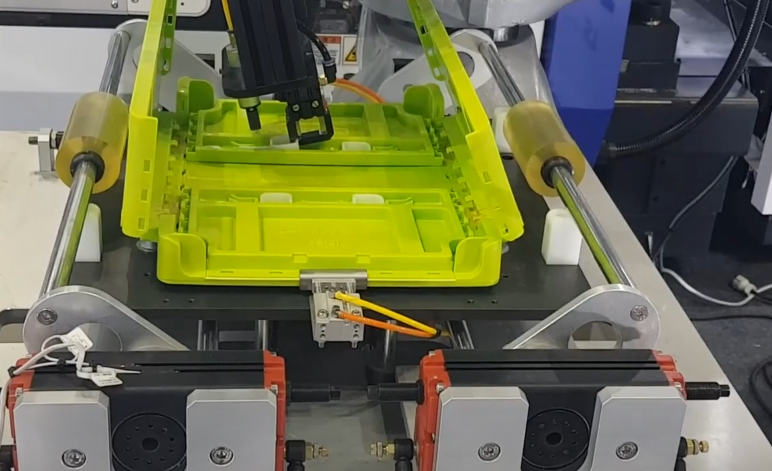
직교로봇이 사출기에서 사출품을 전달하고 나면 이제부터는 다관절 로봇이 조립을 들어가는데요. 이번 사례에서 보여드리는 사출품은 양 옆에 날개부위에 부착시켜주는 작업이 포함돼 있어 다관절 로봇이 우선 양 옆에 부착시켜주는 작업을 하게 됩니다! 다관절로봇이 사출품을 그래서 부착하는 작업 공정 단계로 먼저 이송을 한번 해줍니다
이송이 되고 나면 사출품을 부착하는 자리에 정확하게 놓아주고 나면 부착작업이 진행됩니다!
부착을 하고난 곳에 추가 부품을 작업하기 위해 다관절 로봇이 다시 처음 위치 자리로 이동시켜 줍니다, 이것 역시 적재와 이송 단계(pick and place)라고 할 수 있겠죠~ 그리고 사출품에 추가적으로 필요한 부품은 옆에 위치한 공급피더에서 다관절 로봇이 픽업해와 진행하게 됩니다!
부품을 끼워 맞추는 것도 사출 자동화 하고 나면 이제 작업자가 아닌 다관절 로봇의 몫이 됩니다. 이전에는 작업자가 일일히 수작업을 해야 하는 부담이 있었는데 이제는 다관절 로봇이 되면서 로봇이 스스로 사출품에 부품도 끼워 넣어줍니다!
이렇게 해서 사출품 조립 과정이 모두 끝나면 작업자에게 전달하는 이송 단계만 남았는데요, 컨베이어에 다관절 로봇이 완성된 사출품을 전달을 해주고 나면 컨베이어를 타고 최종 작업자에게 전달하면서 다관절 로봇의 업무를 끝나게 됩니다. 모든 작업이 끝나고 나면 다관절 로봇은 다시 처음 위치로 돌아와서 동일한 작업을 반복하게 됩니다!
이렇게 해서 사출품의 조립과 이송 단계를 사출 자동화 시스템 구축해 다관절 로봇이 직접 움직이고 조립하는 작업을 진행했습니다! 모든 것이 시스템화 되서 돌아가는 모습이 신기하죠? 과거에는 모든 단계들이 작업자들의 수작업에 의해 진행이 됐지만 다관절 로봇을 바탕으로 사출 자동화 시스템을 구축하면서 사출기에서 사출작업을 하고 난 이후에도 로봇을 통해 조립부터 이송까지 모든 단계를 로봇이 책임지게 됐습니다!
더욱 빠르고 정확한 시스템 구축을 위해, 갈수록 더욱 복잡하고 어려워지는 사출 작업을 더욱 간편하게 하기 위해, 그리고 사출품 조립과 이송 작업을 쉽고 정확하게 하고 싶으시다면, 이제 사출 자동화는 더이상 선택이 아닌 필수입니다!