안녕하세요. 나우로보틱스 블로그 지기, 나우지기 입니다. 나우로보틱스 직교로봇 뉴로를 출시를 하고 난 후 현장에서 계속해서 다양한 자동화 시스템을 구현하고 있는데요, 사출 현장에서는 일반적으로 사출 자동화라고 한다면 보통 인서트 사출성형 시스템을 만드는 것을 많이 문의하신답니다! 인서트 사출성형을 하기 위해서는 부품을 공급하는 인서트 장치와 더불어 직교로봇, 사출기 이렇게 세 가지가 정확하고 안정적으로 구축하여 작동해야만 원활한 자동화 시스템으로 구현이 될 수 있는데요,
오늘은 그래서 나우로보틱스의 뉴로 직교로봇을 이용하여 인서트 사출성형 자동화 시스템을 구현한 모습을 보여드리도록 하겠습니다!
우선 오늘 인서트 사출성형 자동화 시스템에 적용된 뉴로 직교로봇은 가반하중 25kg 모델입니다! 뉴로는 가반하중이 5kg 모델부터 시작해서 10kg, 15kg, 그리고 25kg 모델까지 다양하게 라인업이 구비돼 있어서 우리 공장의 사출기 톤수와 공간 등을 확인하고 그에 맞춰 원하는대로 도입이 가능하다는 장점이 있습니다!
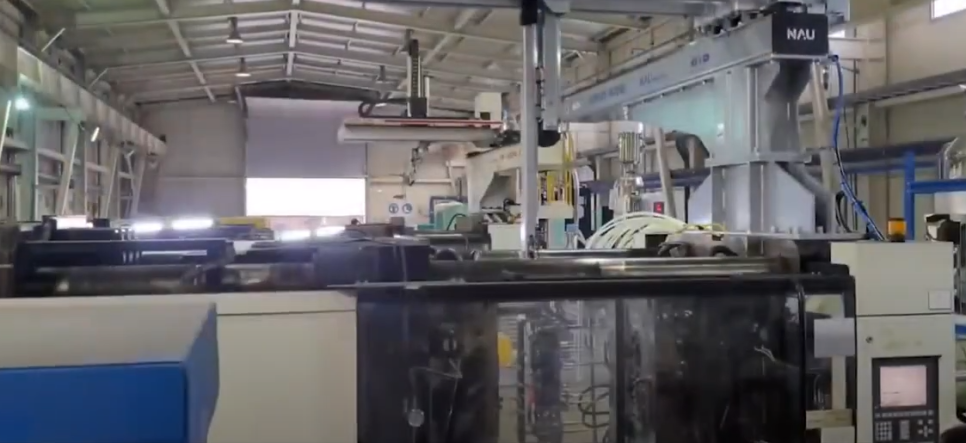
앞서 말씀드렸듯이 인서트 사출성형을 구현하기 위해서는 부품을 공급하는 장치, 직교로봇, 사출기, 그리고 취출 후 제품을 배출할 컨베이어 이 네가지의 요소가 잘 맞아야 구현이 가능한데요, 전반적인 배치형태를 살펴보면 사출기를 중심으로 취출공간가 금형의 개폐위치를 고려하여 직교로봇을 배치하였으며, 아울러 직교로봇의 지그가 하강하는 지점에 컨베이어를 놓고, 뒷편에 부품 공급기를 배치해 놓았습니다.
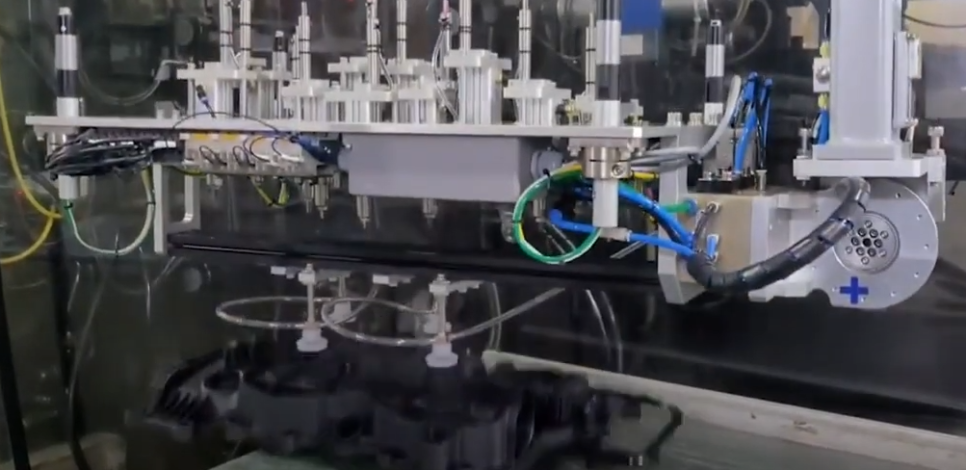
우선 인서트 사출성형의 출발은 부품 공급기에서 사출성형을 진행할 부품을 픽업하는 것에서 출발하겠죠! 인서트 장치에서 부품 공급을 하는 모습인데요, 공급장치로 직교로봇의 취출지그가 내려와 공급장치와 만나 부품을 픽업해 가게 된답니다!
부품을 픽업하고 나면 이제 사출기 안으로 직교로봇이 진입을 하는데요, 먼저 사출성형 과정을 끝낸 완제품을 취출합니다! 한쪽 금형이 열리고 나면 취출지그가 진입하여 완성된 제품을 꺼내옵니다!
취출 후에는 새로운 사출성형을 위해 공급장치에서 받았던 부품을 금형 안에 삽입하는 인서트 작업이 진행됩니다! 오늘 사례에서 소개하는 해당 사출기의 경우 취출 됐던 금형의 반대편에서 인서트를 진행하고 있습니다! 인서트 사출을 진행하는 모습입니다!
취출과 인서트 작업이 모두 끝나면 직교로봇의 취출지그는 밖으로 나와 이제 컨베이어에 제품을 내려놓고 하강하게 됩니다!
외부에서 살펴보는 모습인데요 취출지그 밖으로 나오고 난 후 컨베이어로 이동해 제품을 내려 놓으면 최종 작업자에게 전달되어 인서트 사출성형 과정이 모두 마무리 됩니다!
다른 각도에서 살펴보는 인서트 사출성형의 모습인데요! 뉴로 직교로봇이 사출기 내부의 위치에 맞춰서 취출과 인서트 작업을 반복하고, 컨베이어에 제품을 하강하며, 새로운 인서트 사출을 위해 부품 공급기로 이동하는 것까지 오차없이 정확하게 움직이는 모습입니다!
이렇게 해서 뉴로 직교로봇을 인서트 사출성형 공정에 적용하여 자동화 시스템을 성공적으로 구축한 사례를 보여드렸습니다! 우리 공장에 공정과 원하는 니즈에 맞춰 맞춤형 자동화 시스템을 어렵지 않고 쉽게 제작이 가능합니다! 사출 자동화, 인서트 사출 자동화 구현, 나우로보틱스와 함께하셔서 우리 공장의 생산 효율성을 높여보세요!