안녕하세요, 나우로보틱스 블로그 지기, 나우지기입니다! 생산효율을 높이기 위한 최적의 아이템으로 자리잡은 협동로봇! 산업 제조현장에서도 마찬가지로 다양한 형태로 적용하면서 생산능률을 높이고 있는데요, 오늘 저희 나우로보틱스가 직접 구축한 사례도 마찬가지입니다! 수작업으로 진행하던 공정을 협동로봇을 이용해 생산효율을 훨씬 더 높여주고 있는 협동로봇을 이용한 볼트체결 공정 자동화한 사례를 보여드리도록 하겠습니다!
오늘 사례로 보여드리는 현장은 필터유닛 제품을 생산해내고 있는 한 현장인데요. 이 곳에 협동로봇을 이용해 제품의 조립을 완성하는 공정 자동화 시스템을 구축했습니다.
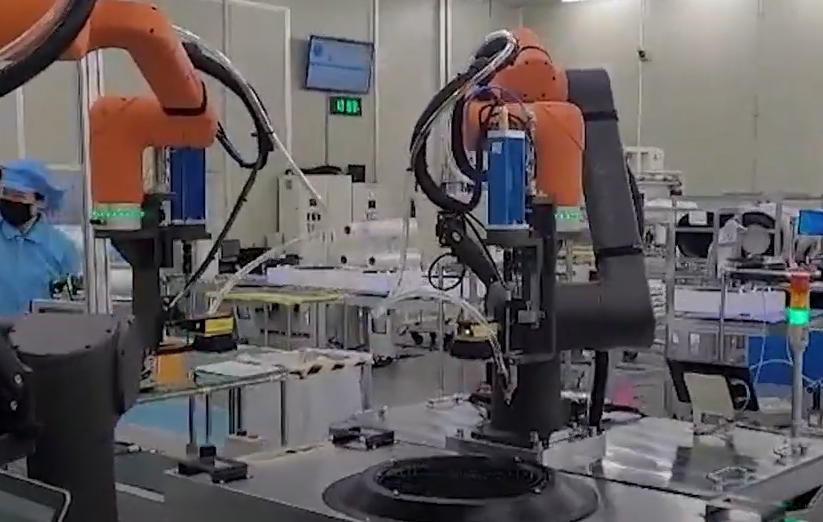
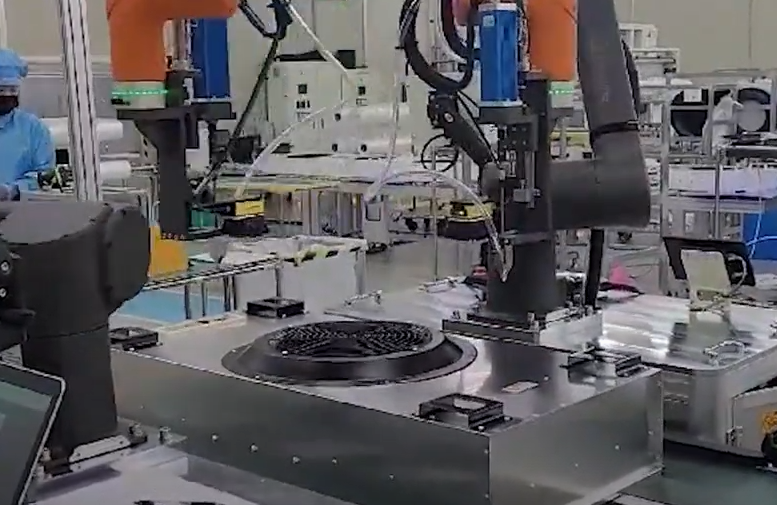
컨베이어를 따라 조립해야 하는 필터유닛 제품이 이동을 하는데요, 협동로봇이 작업을 위해 대기를 하고 있는 모습입니다.
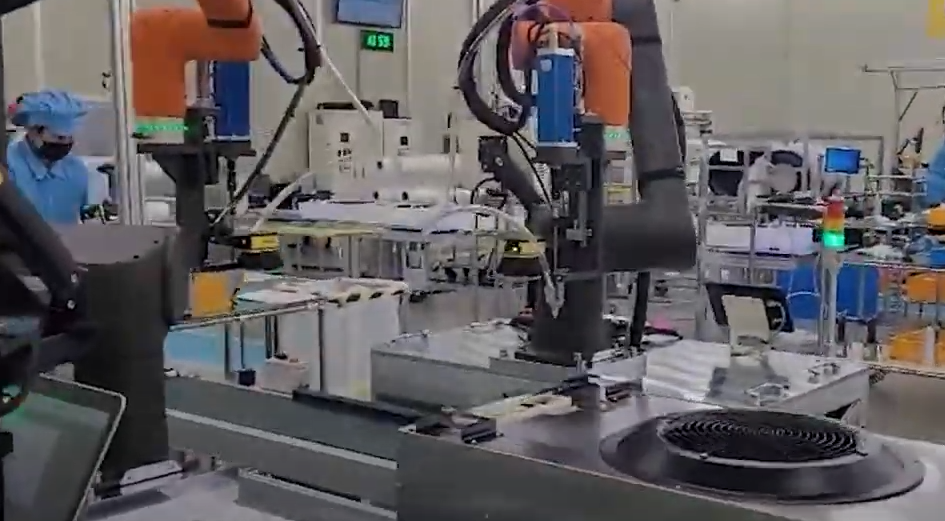
작업 지점에 도착하면 본격적인 작업에 들어가는데요 협동로봇이 이 공정 자동화에서 진행하고 있는 작업은 볼트체결 입니다. 로봇에 달려 있는 지그에 볼트체결을 하기 위한 장치들을 설치하여 정확한 위치에 협동로봇이 제품 조립을 진행합니다.
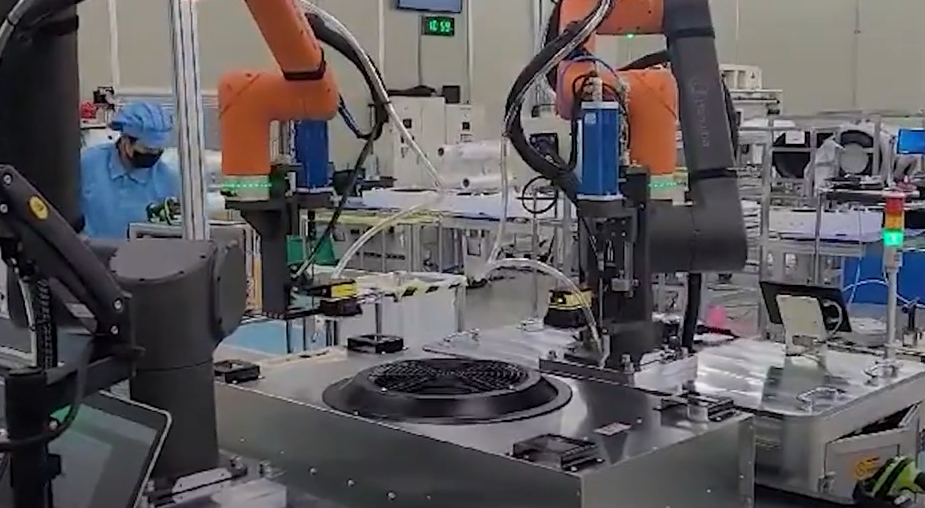
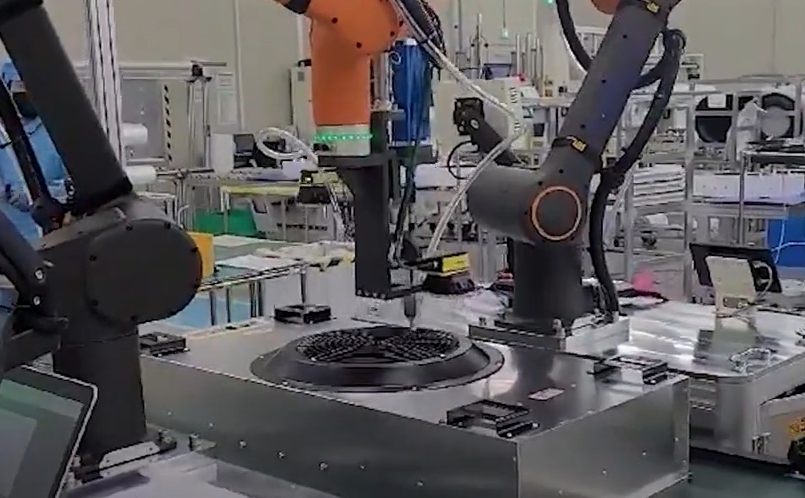
그런데 아무리 로봇이라도 볼트와 같이 작은 제품을 정확한 위치에 맞춰서 진행하기란 쉽지 않은데요, 정확한 위치를 잡기 위하여 저희는 협동로봇에 비전검사처럼 제품을 체크할 수 있는 장치를 별도로 추가로 설치했습니다. 그를 통해서 볼트체결을 진행하기 전에 협동로봇이 한 번 더 정확한 위치가 맞는지를 체크해 보고 본 작업을 진행할 수 있도록 하여 오차를 줄이는데 도움을 주도록 했습니다.
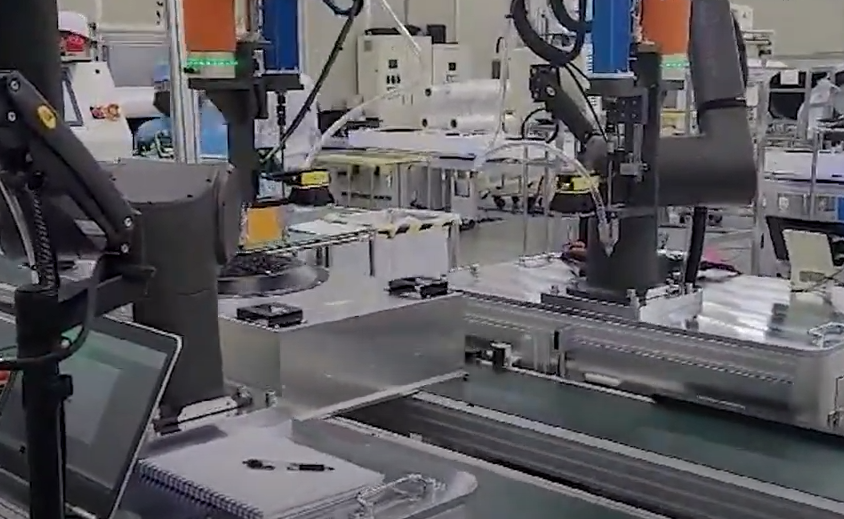
필터 유닛 제품 하나에 볼트체결은 총 4곳을 진행해야 하는데요, 협동로봇 한 대가 각각 두 곳씩 맡아서 볼트체결을 진행합니다!
조립이 모두 끝나면 완성된 필터유닛은 이동하고 다음 제품이 이어서 들어오면서 동일한 볼트체결 공정을 협동로봇이 반복해 공정 자동화를 완성하게 되는 것이죠!