")
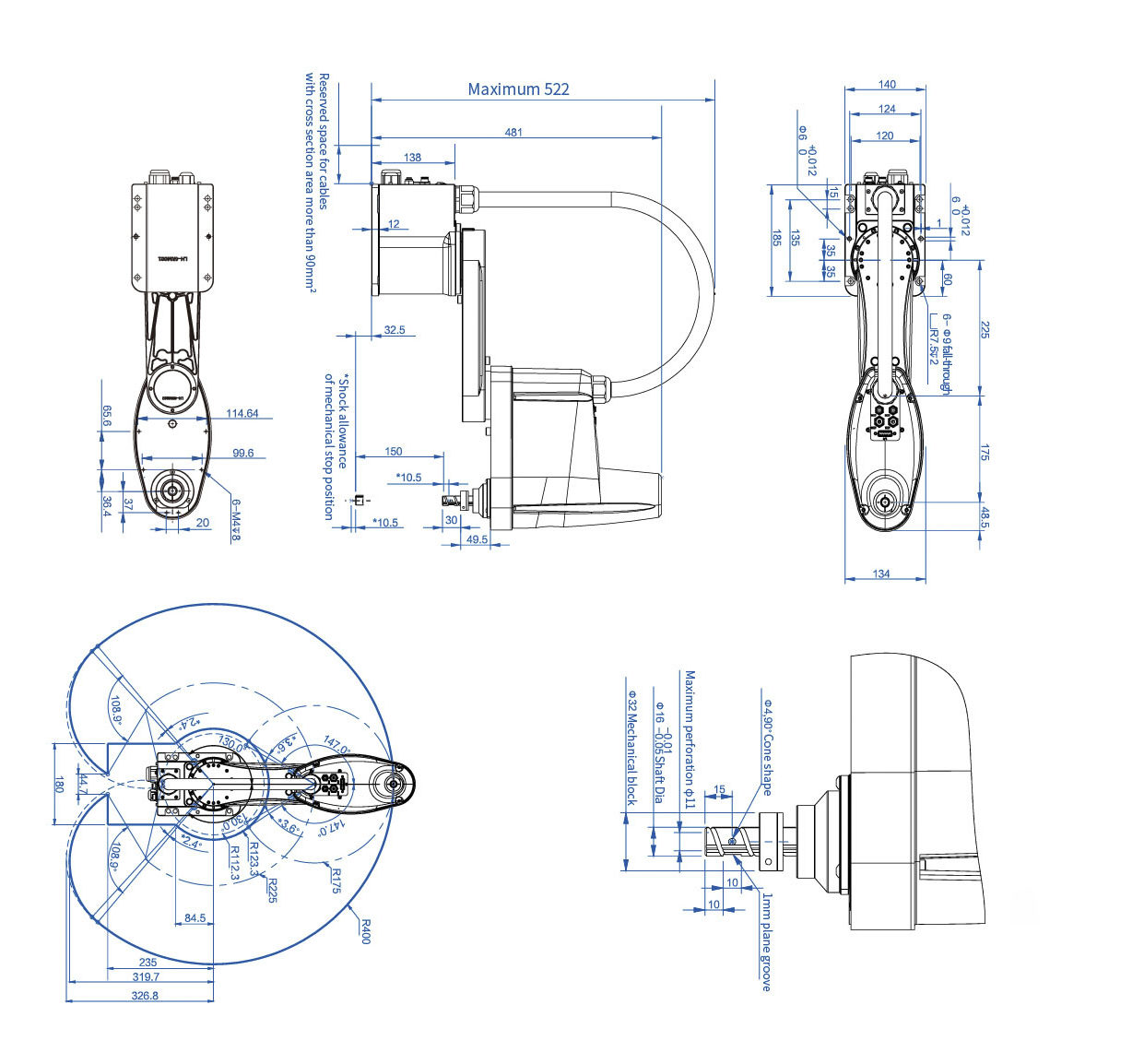
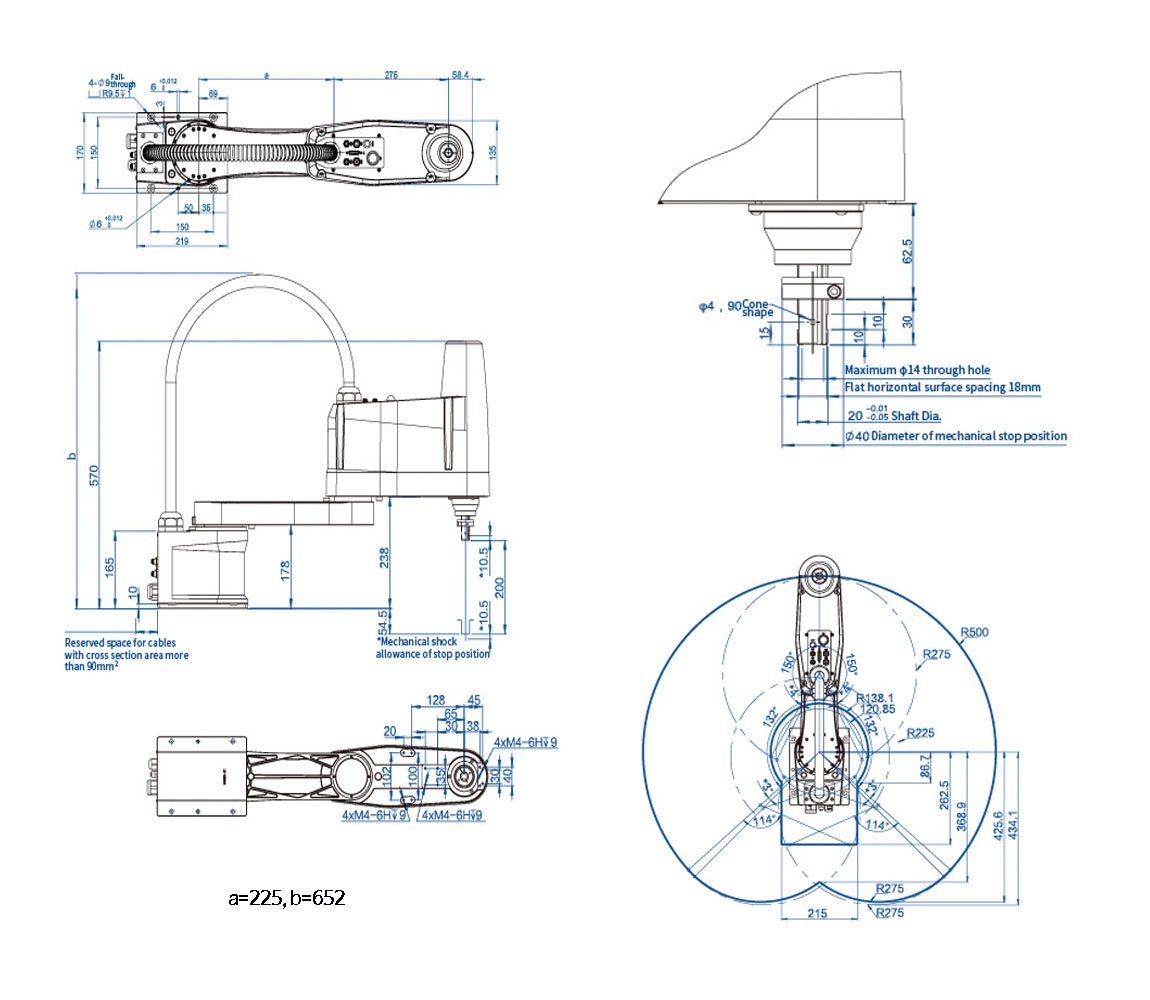
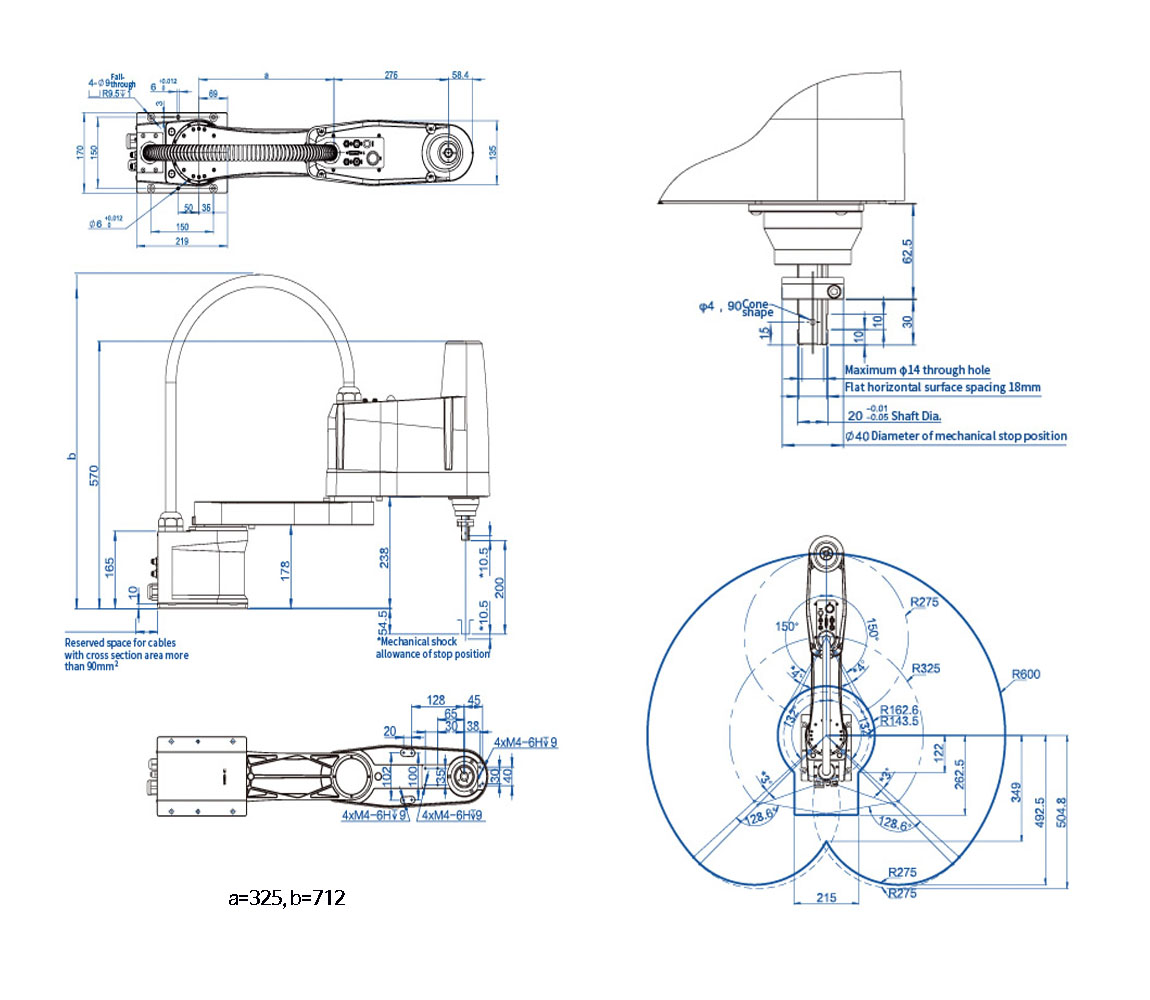
Scara Robot
NUCA
SERIES
The Scara Robot NUCA series achieve rapid speed,
the best performance and the optimal automation!

Optimization
Compact robots optimized to assemble electrical and automotive parts

Productivity
Scara Robots with fast
speed and
high repeatability

High Efficiency
Occupy less space
and have a wide
operating radius
Reasonable Price
Lower burden with
reasonable and economical price
compared to other products
Easy Maintenance
Easy and simple maintenance
after buying a Scara robot
applied with sufficient system solution





TAICHI Programming Language
As a programing language which is easy and can be simply used, it can be employed to control robot motions and to make i/O and network communication.
Apply the i/O System
A standard digital I/O system and a Fieldbus I/O module are applied, Modbus RTU communication in addition to TCP I/P
Provide a Tracking Module
It is useful for robots to directly choose operation positions by providing conveyor tracking modules and to engage in work.
Supporting System Module
It is possible to adjust a third driver and motor through Fieldbus.




