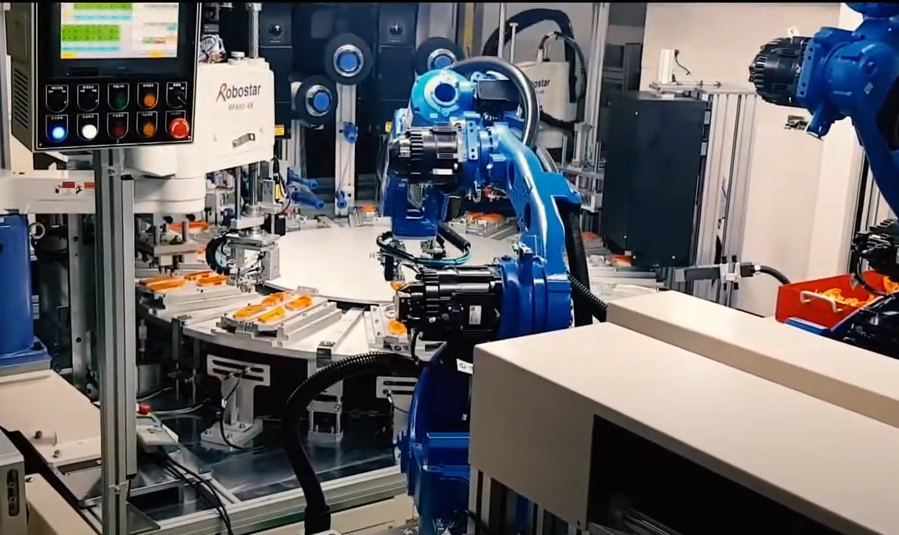
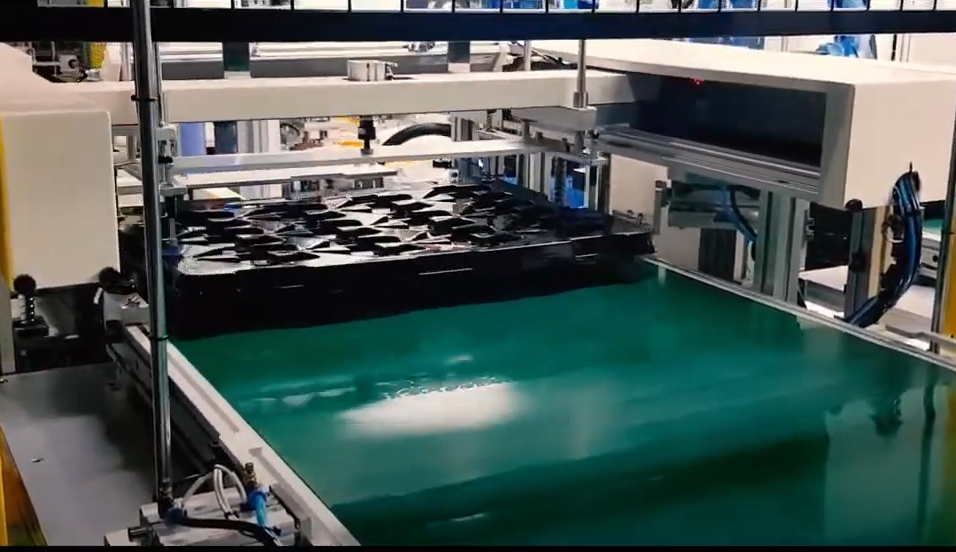
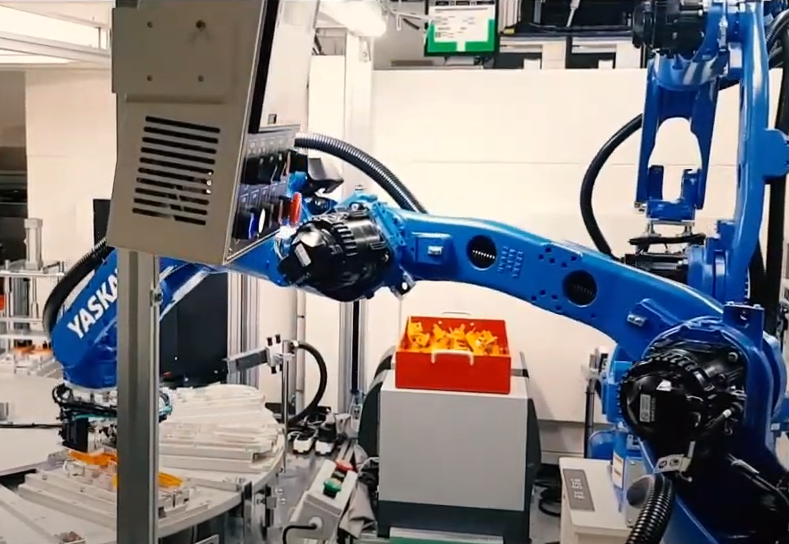
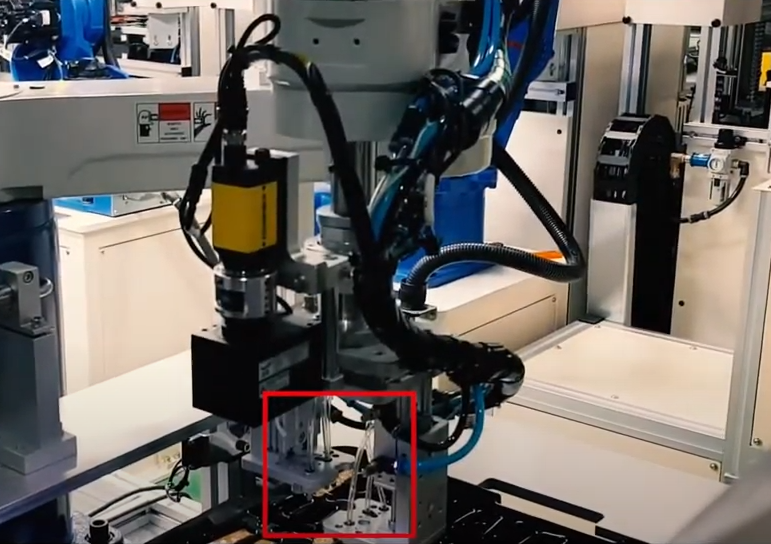
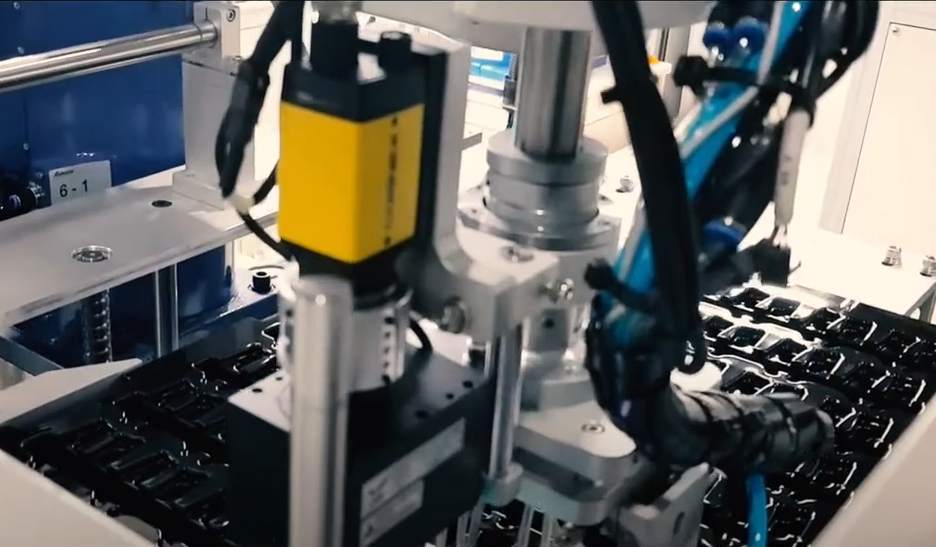
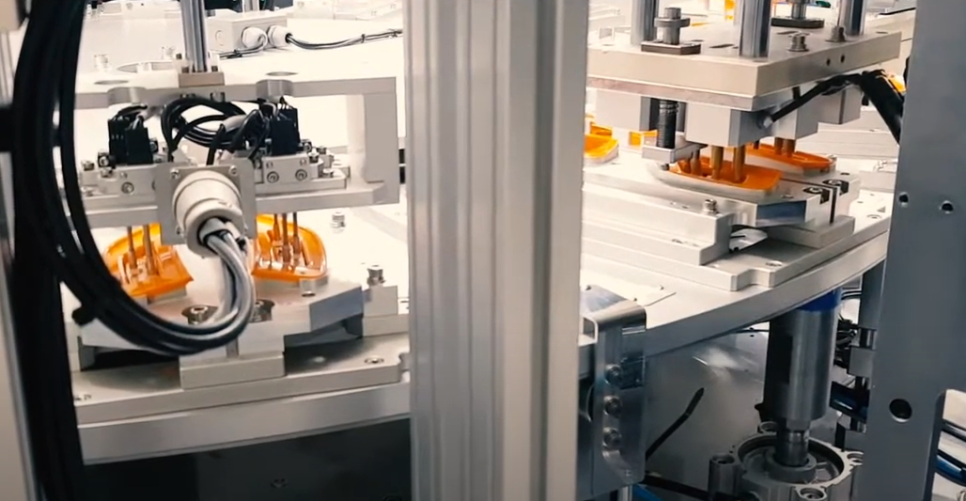
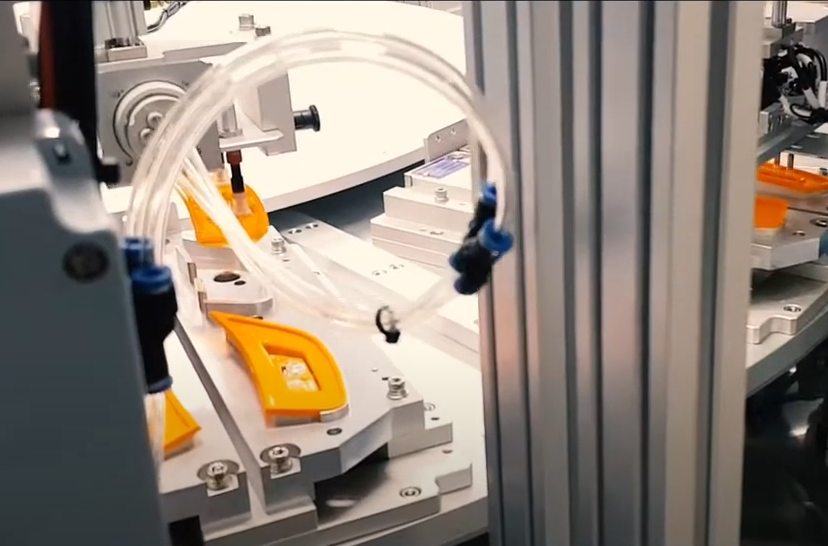
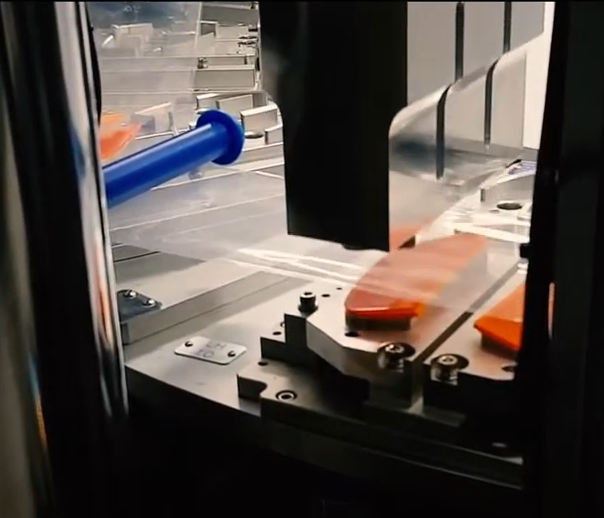
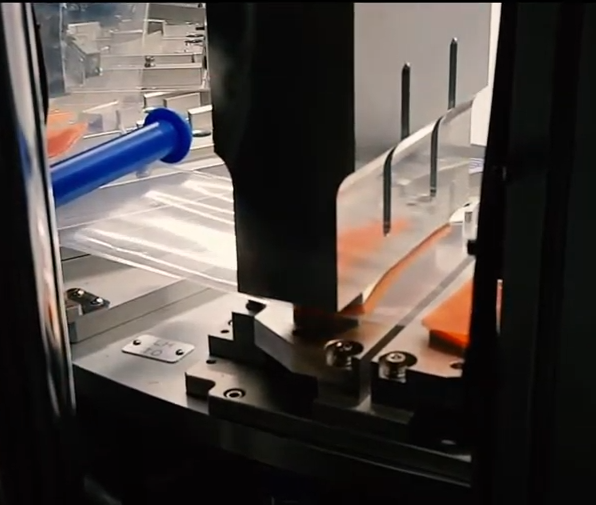
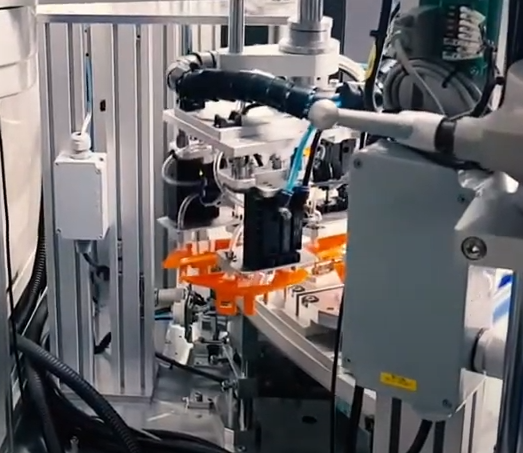
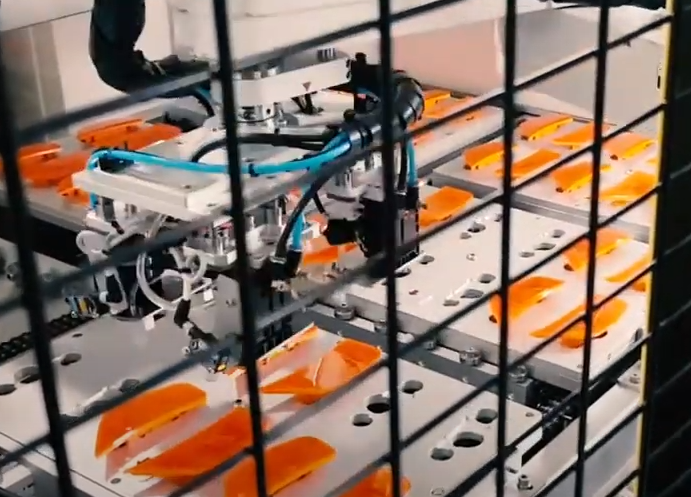
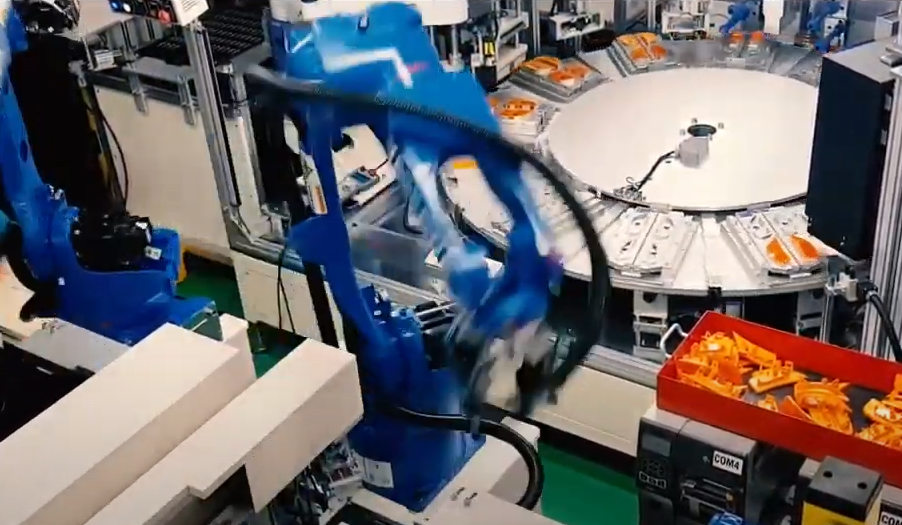
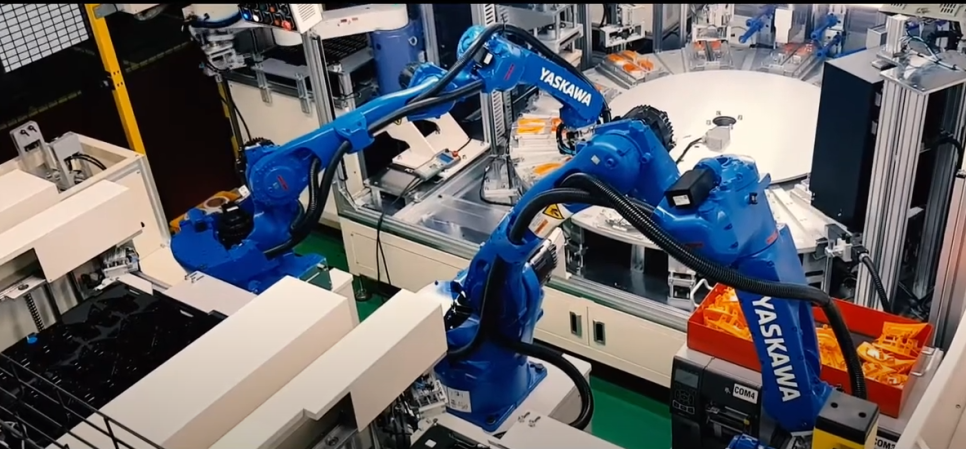
이렇게 해서 야스카와로봇과 스카라로봇 등 자동화기계를 이용하여 모든 PCB 렌즈부품의 공정 작업이 끝이 났습니다. 작업이 끝났다고 해서 자동화 라인이 모두 끝나는 것은 아닙니다. 마지막에 최종 작업자에게 안전하게 전달해주는 작업도 자동화기계의 몫인데요. 오늘 사례에서는 스카라로봇이 그 역할도 함께 합니다. 스카라로봇이 완성된 부품을 픽업하여 완성품을 별도로 모아놓는 트레이에다가 진열을 하게 됩니다. 이후에는 에어리크(공기가 새는지 여부체크), PCB 점등 검사 등을 통해 불량품 여부를 체크하여 최종적으로 모든 작업이 끝나게 됩니다!